Welcome Week and Pancake Breakfast
Welcome week started off with the Club Expo in the Usask Bowl and ended with a wonderful pancake breakfast before our new member orientation and first design meeting of the…
Posts to appear on the front page
Welcome week started off with the Club Expo in the Usask Bowl and ended with a wonderful pancake breakfast before our new member orientation and first design meeting of the…
Header Image - Our team at CIRC Protocase Central (Credit: Angela Howell) Our team had a great showing at the second annual Canadian International Rover Challenge. Our team only had…

Our team has just returned from competition in Utah, placing 18th out of 98 teams. The extensive use of carbon fibre on our rover has lead to a larger and…

We are proud to announce our involvement in the upcoming 4-year Canadian CubeSat Project. We have partnered with the University of Saskatchewan and Saskatchewan Polytechnic to build a 10x10x20 cm…

Space Team VP of Engineering, Seamus Woodward-George, assembled the last of his Cycloidal Drive gearboxes this week. The gearboxes took months of design work and multiple 3D printed and laser…

This morning USST President Austin Shirley was interviewed on Global News this morning. Austin spoke about how the President’s Student Experience Fund enables the Space Team to build our rover…
Project STARFOX (Spinning Terrestrial Analog Regolith Filtering Operation eXperiment), the USST proposal for the Canadian Reduced Gravity Experiment Design Challenge (CAN-RGX), has been accepted. The STARFOX Division will be headed to Ottawa…
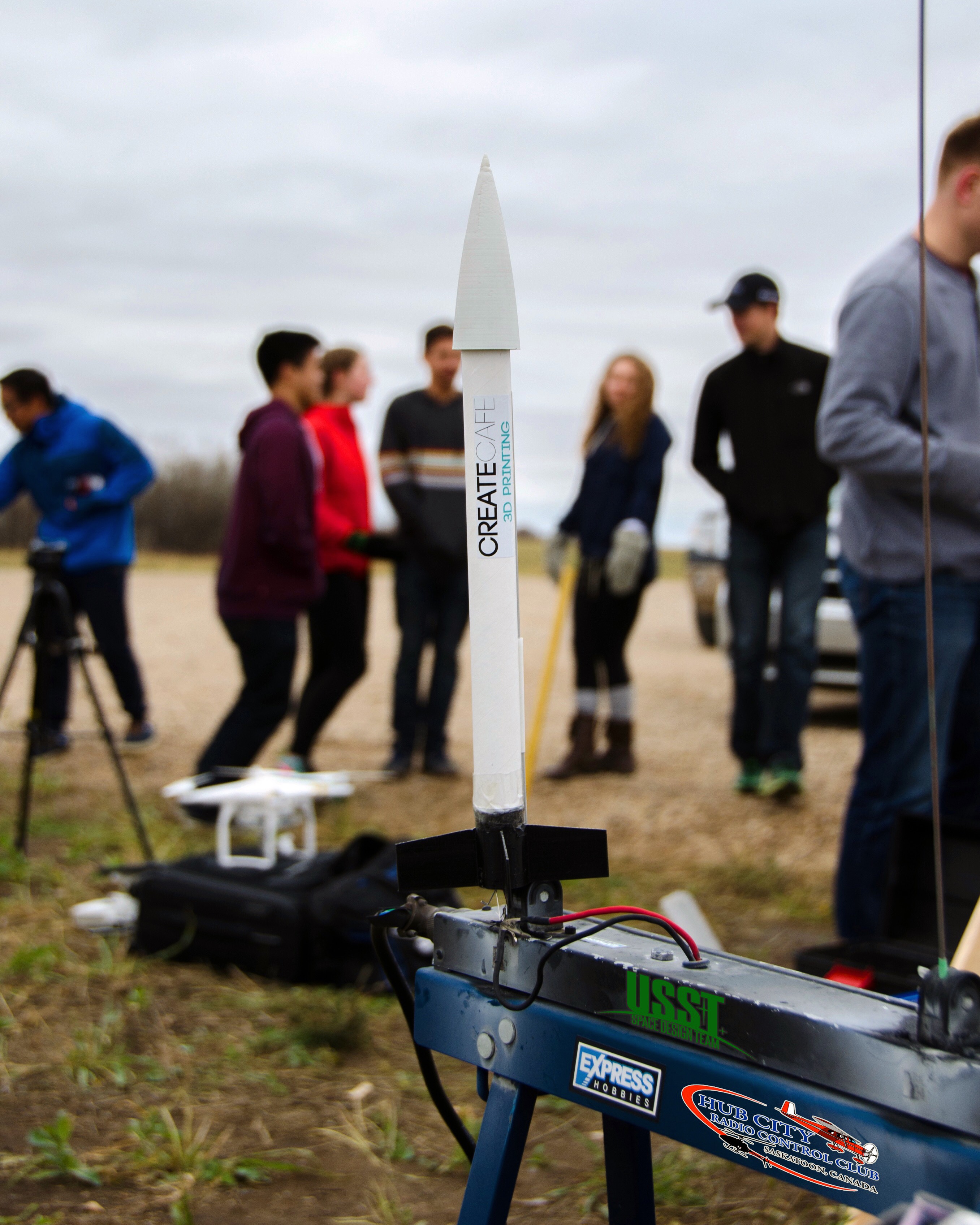
Our rocketry project ended with much excitement, as the groups tested their custom designed rockets on the launch pad. RLee (from the Department of Chemical and Biological Engineering) demonstrated his…
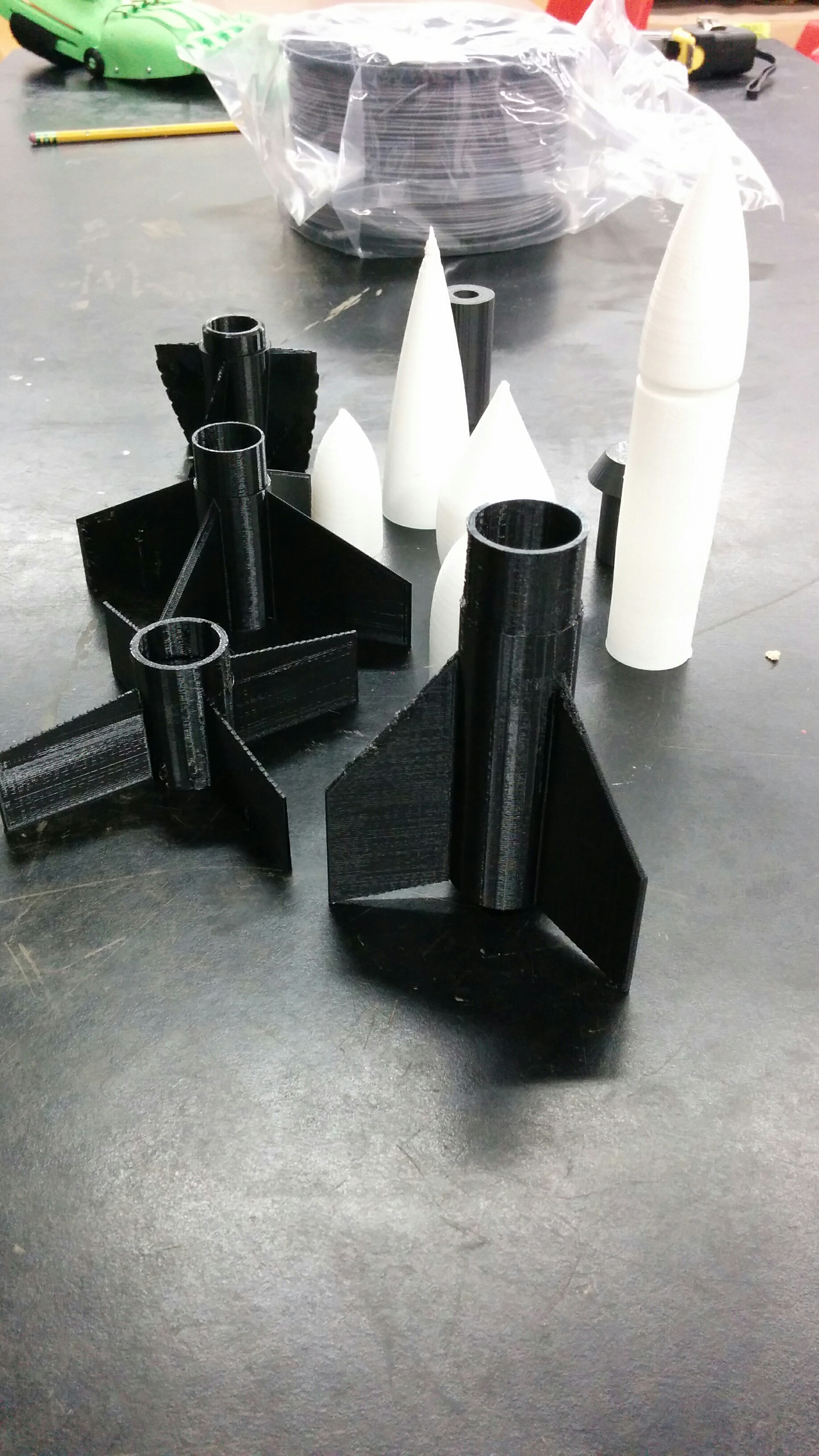
The parts for our 3D printed rockets arrived from Create Cafe this week and our new members began assembling them today. They have learned a lot about the importance of…
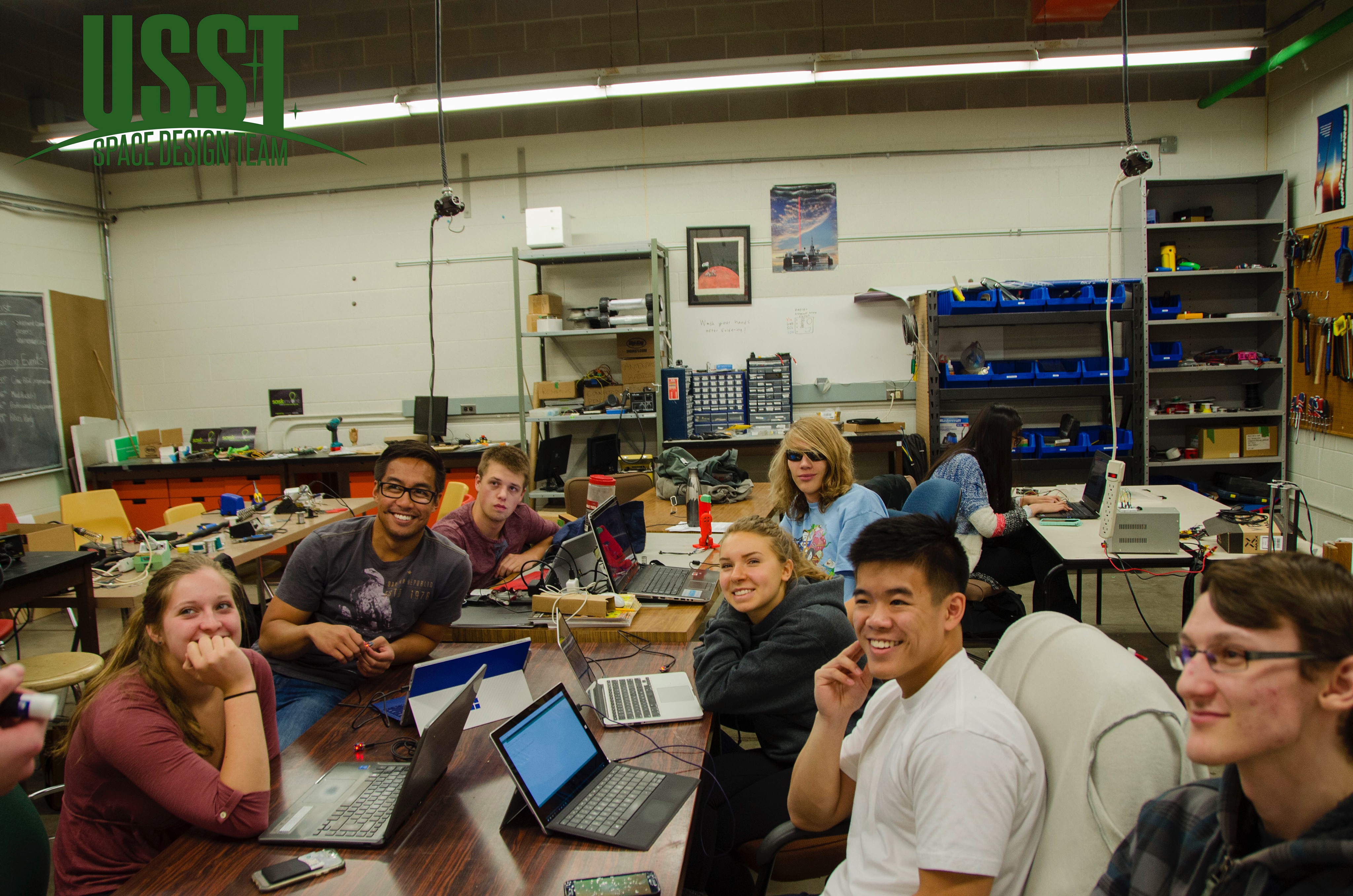
Electrical Team Lead, Carl Hofmeister, lead a great coding workshop for our new members this weekend. The new members are learning how to program data loggers for their rockets. Image…