Posts to appear on the front page

Enjoying the fall colours with the 2015 European Rover Challenge champion!
Happy Thanksgiving from all of us at the UofS Space Design Team! We are greatful for all the the community and industry support we have and continue to receive!

Accepting our first place prizes in a state of overjoyed disbelief
After finally getting some sleep last night - though not as much as we wanted - we got to the ERC competition grounds to complete our final event - the…

European Rover Challenge 2015
Today, the USST finished our first day of competition at ERC! As we suspected, we ended up staying up until around 4:30 am last night working on the rover, only…
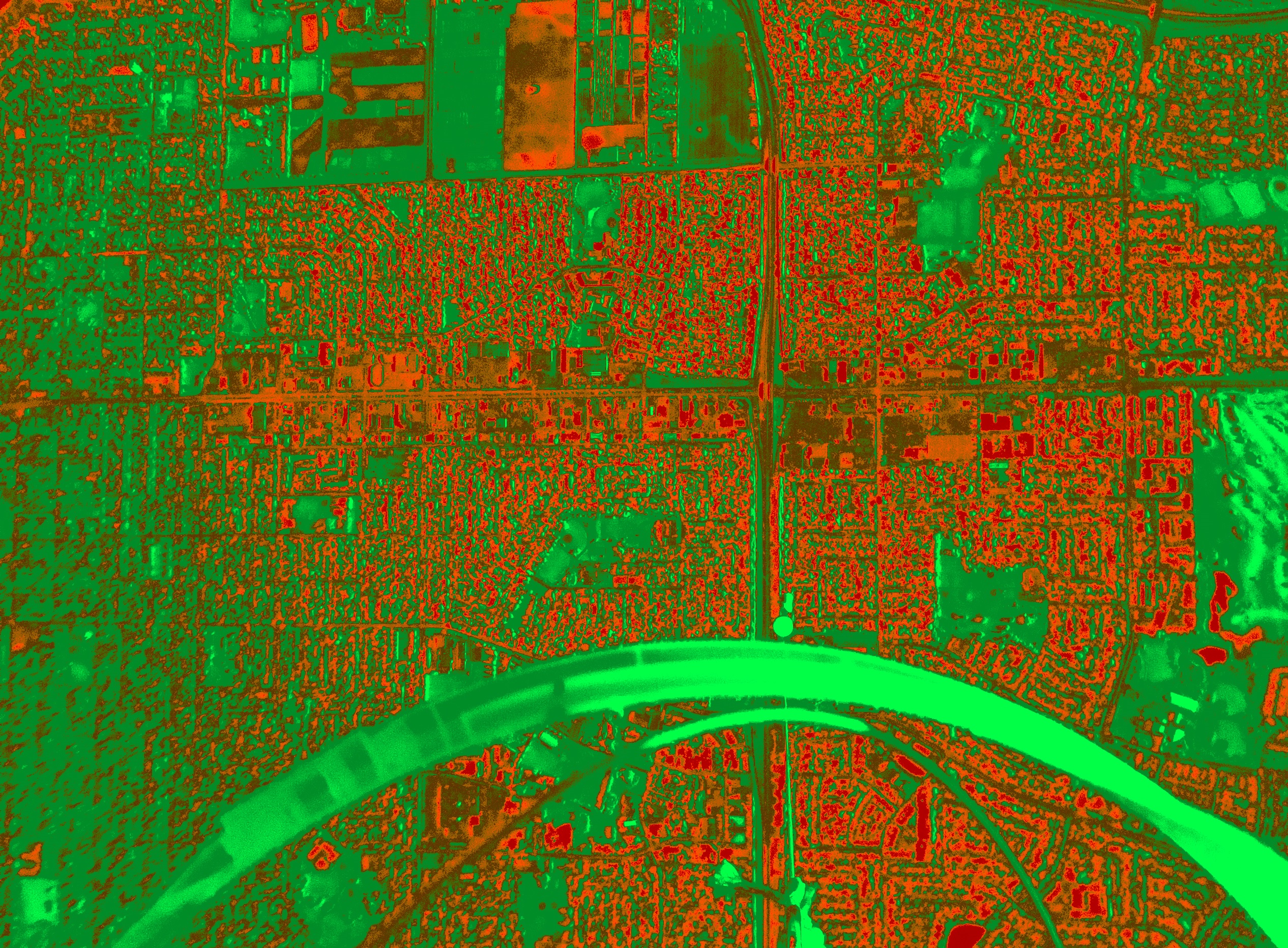
Below are the images we processed off of our High Altitude balloon. The first is a NDVI (Normalized Difference Vegetation Index), the second is a raw Infra Red Image, and…
Today we embarked on our first High Altitude Balloon Launch of the year. We fixed the issues with our cameras from the launch last September, and ran a completely redesigned…